Lupine Publishers| Journal of Biomedical Engineering and Biosciences

abstract
The structural scheme and the transfer functions, the characteristics of the electro elastic actuator for micro and nano surgical repairs are obtained. The transfer functions of the electro elastic actuator are described the characteristics of the actuator with regard to its physical parameters and external load.
Keywords: Electro elastic actuator; Piezo actuator; Structural scheme; Transfer function
Introduction
The electro elastic actuator on the piezoelectric, electrostriction effects is used in the mechatronics systems for the micro and nano surgical repairs, for the micro and nano robotics, for the micro and nano manipulators and injectors [1-6]. The mathematical model, the structural scheme and transfer functions of the electro elastic actuator are calculated for designing the control system for the micro and nano surgical repairs [4-11]. The structural scheme and transfer functions the electro elastic actuator based on the electro elasticity make it possible to describe the dynamic and static properties of the electro elastic actuator for the micro and nano surgical repairs with regard to its physical parameters and external load [12-23].
Structural Scheme Electro Elastic Actuator
The method of mathematical physics with Laplace transform is applied for the solution the wave equation. The structural scheme of the electro elastic actuator for the micro and nano surgical repairs is changed from Cady and Mason electrical equivalent circuits [7- 8]. The equation of the electro elasticity [6,8,12] has the following form
where Si is the relative displacement along axis i of the cross
section of the piezo actuator, is the control parameter, Em, is the electric field strength for the voltage control along axis m, Dm is the electric induction for the current control along axis m,
Tj is the mechanical stress along axis j, νmi is the electro elastic
module, for example, the piezo module, ij sΨ is the elastic compliance
for the control parameter Ψ = const , and the indexes i= 1, 2, … ,
6; j = 1, 2, … , 6; m = 1, 2, 3. The main size along axis i for the electro
elastic actuator is determined us the working length l = {δ , h,b}
in form the thickness, the height or the width for the longitudinal,
transverse or shift piezo effect.
is the control parameter, Em, is the electric field strength for the voltage control along axis m, Dm is the electric induction for the current control along axis m,
Tj is the mechanical stress along axis j, νmi is the electro elastic
module, for example, the piezo module, ij sΨ is the elastic compliance
for the control parameter Ψ = const , and the indexes i= 1, 2, … ,
6; j = 1, 2, … , 6; m = 1, 2, 3. The main size along axis i for the electro
elastic actuator is determined us the working length l = {δ , h,b}
in form the thickness, the height or the width for the longitudinal,
transverse or shift piezo effect.
For the construction the structural scheme of the electro elastic actuator is used the wave equation [8,10,14] for the wave propagation in the long line with damping but without distortions. With using Laplace transform is obtained the linear ordinary second-order differential equation. The problem for the partial differential equation of hyperbolic type using the Laplace transform is reduced to the simpler problem [8,14] for the linear ordinary differential equation
where Ξ(x, p) is the Laplace transform of the displacement
of the section of the electro elastic actuator  α Ψ = + is the
propagation coefficient, cΨ is the sound speed for the control
parameterΨ = const ,α is the damping coefficient.
α Ψ = + is the
propagation coefficient, cΨ is the sound speed for the control
parameterΨ = const ,α is the damping coefficient.
The mathematical model [6, 23] and the structural scheme of the electro elastic actuator for the micro and nano surgical repairs on Figure 1 are determined, using method of the mathematical physics for the solution of the wave equation, the boundary conditions and the equation of the electro elasticity, in the following form
Figure 1: Structural scheme of electro elastic actuator for micro and nano surgical repairs.

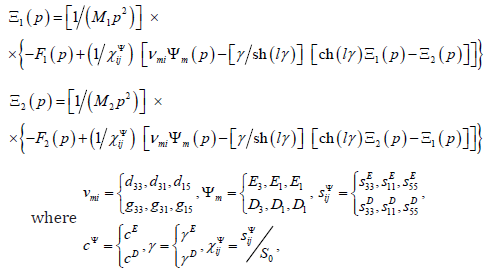
vmi is the electro elastic module, is the control
parameter, m E is the electric field strength for the voltage control
along axis m, m D is the electric induction for the current control
along axis m,
sΨij is the elastic compliance, dmi is the piezo module
at the voltage-controlled piezo actuator, gmi is the piezo module at
the current-controlled piezo actuator, S0 is the cross section area,
M1 , M2 are the mass of the load,  are
the Laplace transforms of the appropriate displacements and the
forces on the faces 1, 2. For the micro and nano surgical repairs the
structural schemes of the voltage-controlled or current-controlled
piezo actuator are obtained from its mathematical model.
are
the Laplace transforms of the appropriate displacements and the
forces on the faces 1, 2. For the micro and nano surgical repairs the
structural schemes of the voltage-controlled or current-controlled
piezo actuator are obtained from its mathematical model.
Transfer Function Electro Elastic Actuator
The matrix transfer function [6,18,21] of the electro elastic actuator for the micro and nano surgical repairs is derived from its mathematical model in the following form

where (Ξ( p)) is the column-matrix of the Laplace transforms of the displacements for the faces 1, 2 of the electro elastic actuator, (W( p)) is the matrix transfer function, (P( p)) the column-matrix of the Laplace transforms of the control parameter and the forces for the faces 1, 2.
Conclusions
The structural scheme, the transfer functions of the electro elastic actuator for the micro and nano surgical repairs, for the micro and nano robotics, for the micro and nano manipulators and injectors are described the characteristics of the electro elastic actuator with regard to its physical parameters, external load.
No comments:
Post a Comment
Note: only a member of this blog may post a comment.